Category:ロボット工学

シーケンス制御
メカトロニクス
Mechatronics
ロボット工学三原則
Three Laws of Robotics
アクチュエータ
Actuator
倒立振子
Inverted pendulum
センサ
Sensor
継電器
Relay
ニューロモルフィック・エンジニアリング
Neuromorphic engineering
制御工学
Control engineering
ヨーイング
Yaw angle
機械要素
Machine element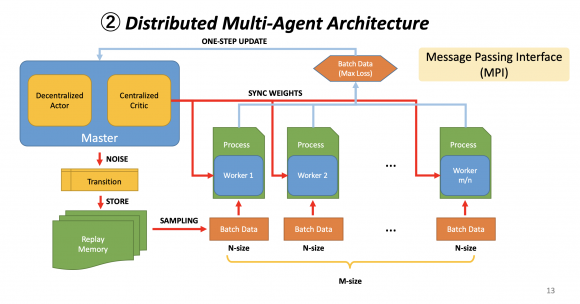
マルチエージェントシステム
Multi-agent system二足歩行ロボット
Legged robot
人工筋肉
Artificial muscle
サーボ機構
Servomechanism
オーディオアニマトロニクス
Audio-Animatronics
ゼロモーメントポイント
Zero moment point
ピッチング
Pitch axis (kinematics)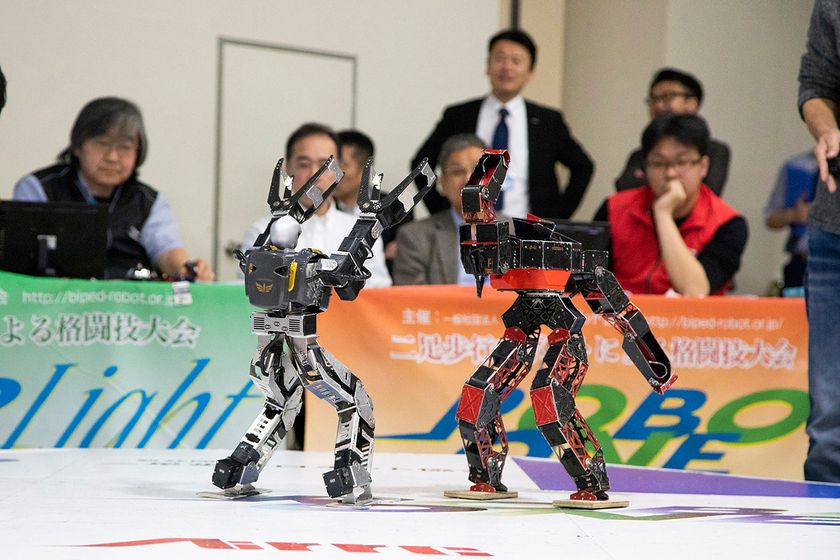
ロボット競技
Robot competition
サーボモータ
Servomotor
協働ロボット
Cobot
ヴォコーダー
Vocoder
衝突判定
Collision detection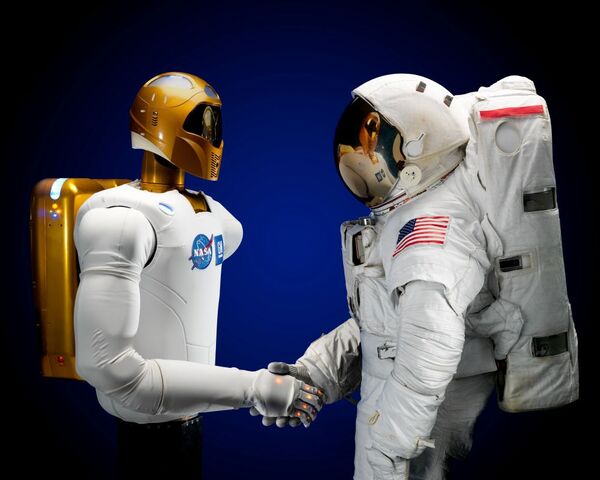
宇宙ロボット
Robotic spacecraft
コンピュータ数値制御
Numerical control
ラボラトリーオートメーション
Laboratory automation
6DoF
Six degrees of freedom
テレロボティクス
Telerobotics